
一、大模型阶段:认知能力的范式突破
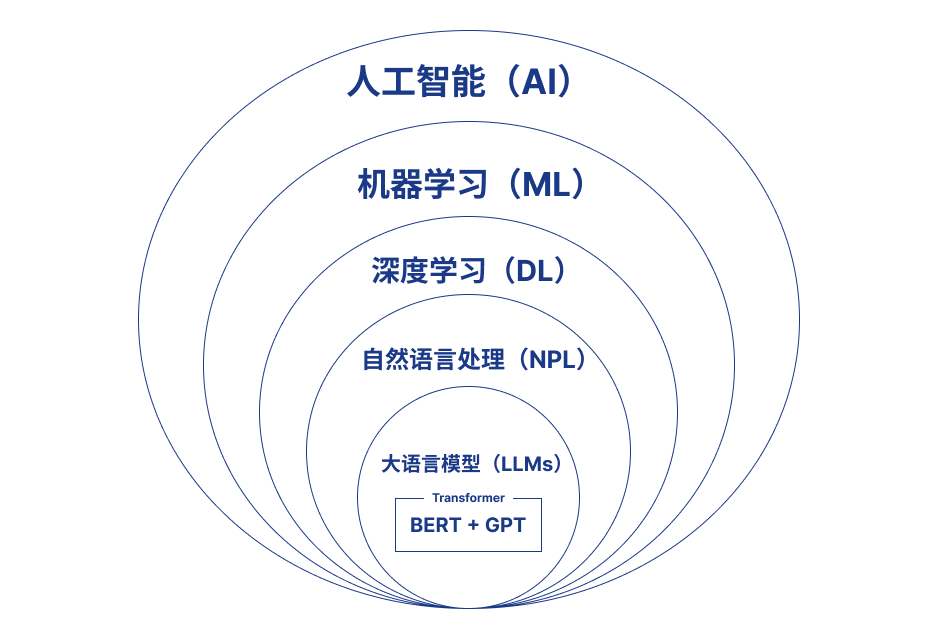
以Transformer架构为标志的预训练大模型(如GPT、BERT)实现了自然语言处理领域的范式革命。其核心突破在于:
-
参数规模的量变引发质变:千亿级参数量使模型具备上下文学习能力,可通过少量示例完成zero-shot/few-shot迁移 -
多任务统一框架:通过指令微调实现文本生成、逻辑推理等多任务兼容,打破传统模型专用化局限 -
知识蒸馏的突破:PaLM、GLM等模型验证了尺度定律(scaling law)有效性,知识密度随参数量呈非线性增长
典型应用如Codex实现代码生成,AlphaFold破解蛋白质结构预测难题,标志着AI开始具备专业领域认知能力。但该阶段仍停留在被动响应层面,缺乏主动交互与持续学习机制。
二、智能助手阶段:场景化交互的深化
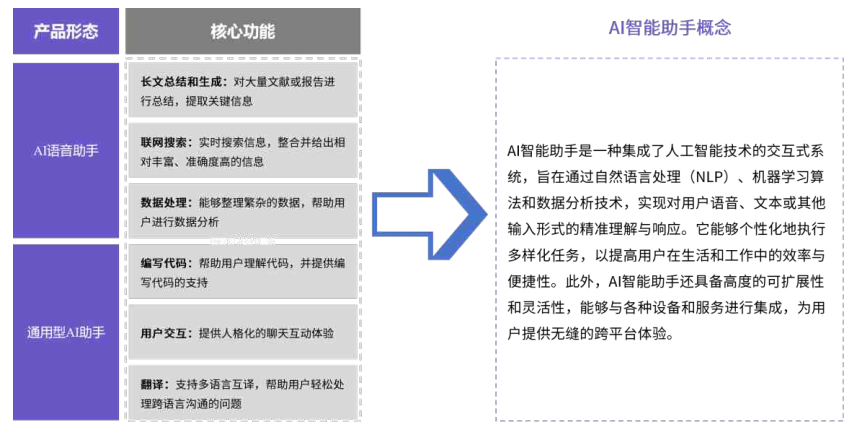
基于大模型的智能助手(如Copilot、小冰)构建了人机协同的新界面:
-
多模态交互进化:融合语音、视觉、动作感知(如苹果M系列芯片的传感器融合) -
上下文感知增强:通过记忆存储(如Meta的MemNN)实现跨会话状态保持 -
领域知识注入:医疗助手Qwenmed、法律助手DoNotPay通过知识图谱增强专业性
微软Viva Insights通过分析邮件、日历数据提供工作效率建议,体现从工具到决策伙伴的转变。但其本质仍是”刺激-反应”机制,决策链路缺乏自主规划能力。
三、智能体阶段:自主决策系统的萌芽
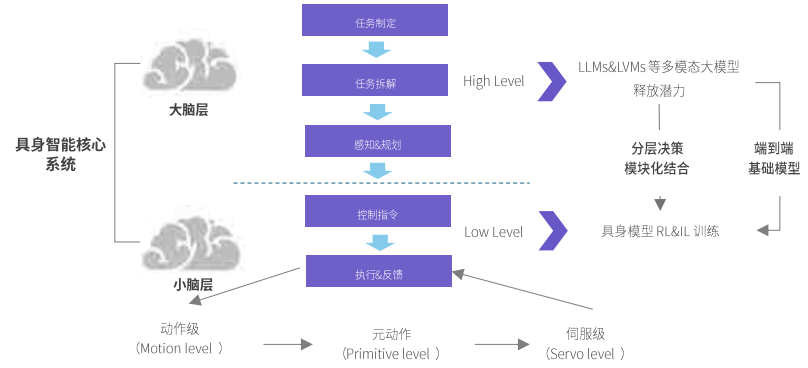
最新研究聚焦构建具有自主行动能力的智能体(Agent),典型架构包含:
-
感知-行动闭环:LLM作为决策中枢,连接视觉(CLIP)、机械控制(RT-2)、网络访问(WebGPT)等模块 -
工具调用协议:LangChain框架定义标准化tool_call接口,实现API动态调用 -
反思优化机制:MetaGPT引入批评反馈循环,AutoGPT集成自我改进模块
典型案例包括:
-
数字员工:Salesforce Einstein GPT实现CRM全流程自动化 -
物理实体:波士顿动力Atlas机器人结合强化学习完成复杂任务 -
虚拟代理:斯坦福AI虚拟小镇中的角色实现社交互动与协作 - 消费级应用:Trae平台“今天吃什么”智能体
- 博弈决策:卫星海洋实验室多智能体资源博弈模型
四、演进逻辑与技术瓶颈
-
数据驱动转向目标驱动:从监督学习的标注数据依赖转向强化学习的奖励函数设计 -
单点智能向系统智能升级:需要解决多智能体协作的博弈均衡问题(如DeepMind的AlphaStar) -
能耗效率挑战:Gato的多任务训练消耗250TPU天数,距离生物能效仍有数量级差距
当前技术仍面临三大鸿沟:因果推理缺失导致决策不可解释;小样本泛化能力不足;物理交互的sim2real迁移困难。MIT近期研究表明,顶尖LLM在抽象物理推理测试中仅达6岁儿童水平。
五、未来演进方向
-
神经符号系统融合:将知识图谱的结构化推理与神经网络模式识别结合(如IBM的Neural-Symbolic AI) -
具身智能突破:通过虚拟环境(如NVIDIA Omniverse)实现多模态预训练 -
类脑计算架构:英特尔Loihi芯片验证的脉冲神经网络,能效比达传统GPU的1000倍
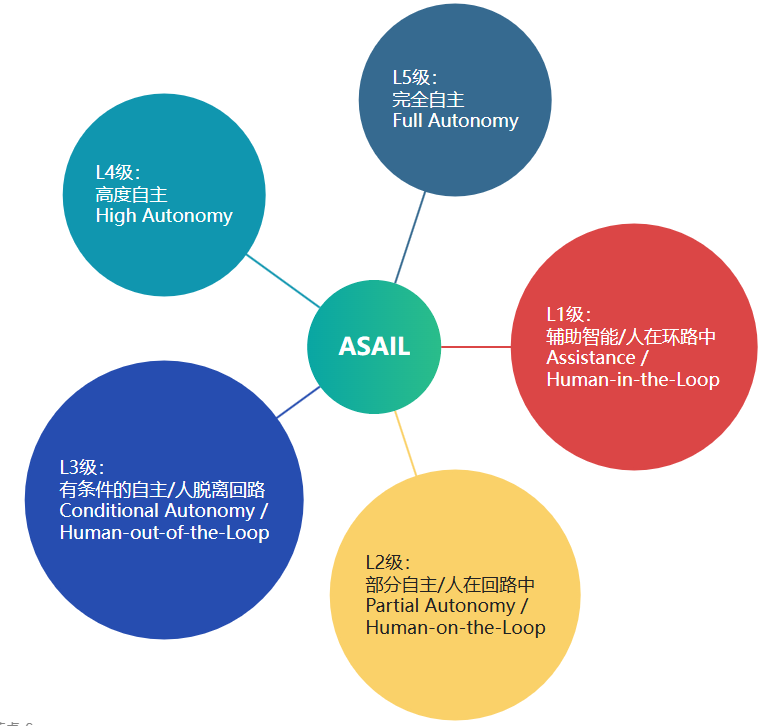
欧盟ASAIL分级标准已将智能体自主性划分为L1-L5级,预计2030年前后将出现具备L4级自主性的工业数字孪生体。但伦理学家警告,需同步构建”可中断机制”(如DeepMind的CIRL框架)确保控制性。
这种从”巨无霸模型”到”微型大脑”的演进,本质是AI系统从云端服务向边缘智能的迁移。当智能体开始自主重构目标函数,人类将面临从工具使用者到协作伙伴的身份转变。技术突破需要同步建立新的治理框架,在提升生产力的同时防范代理风险失控。
© 版权声明
文章版权归作者所有,未经允许请勿转载。