
我花了整整3年多时间,从最早摸索大模型推理,到如今搭建反思式Agent系统,见证了“规划组件”这一核心模块从线性到动态优化的演化。回过头看,这不仅是技术的进步,更是我从“让模型听话”到“让系统自省”的心路历程。
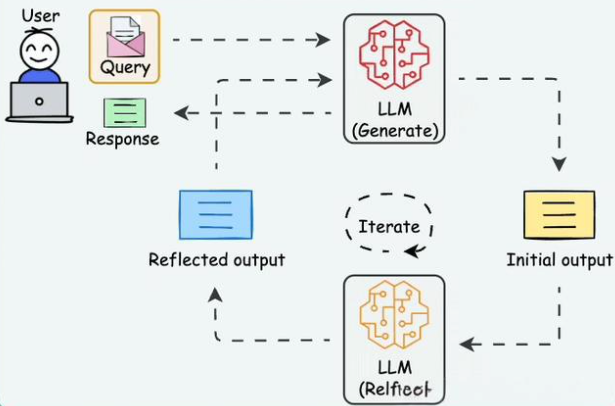
一开始,我接触的是最基础的Chain-of-Thought(CoT)。那时候,我还没意识到“规划”是什么,只是学着让模型一步步推理。每次看到模型把思考过程写出来——哪怕只是“第一步:提取关键词;第二步:判断逻辑关系”——都让我感到踏实。CoT 像一盏小灯,让我第一次看清了模型脑海里的路径。它简单、可解释,但也止步于此:面对需要工具或交互的任务,它显得无能为力。接着我遇见了ReAct(Reason + Act)。那是我第一次见到模型能“边想边做”。我让它去调用搜索API,它居然能读完结果,再接着思考下一步。这种“思考—行动—反馈—再思考”的循环让人上瘾。但真实环境里,工具接口失效、数据异常都可能打断它的节奏。我花了无数时间在日志里查找哪一步“反应过度”。ReAct 给了我惊喜,也让我第一次体会到智能体的“不可控”。等到我开始构建稍复杂的业务流程,比如自动生成报告、跨系统任务执行,我才真正意识到必须要有清晰的结构。这时登场的是Plan-and-Execute。我把模型分成两部分——一个负责“想”(Planner),一个负责“干”(Executor)。Planner 会先生成详细计划,Executor 按部就班执行。它像是我在团队里写好了项目方案,再分配任务给同事去做。这种解耦带来了稳定性和可追踪性,但问题也来了:只要初次规划出错,整个流程就可能误入死胡同。于是我开始琢磨——有没有办法让模型自己修正?后来我读到分层规划的案例,便开始尝试Hierarchical Planning。那一刻,我突然明白,这不只是“结构化”,而是“组织化”。我让上层Agent管战略(确定目标与策略),中层Agent管战术(分解子任务),底层Agent管执行(与工具打交道)。那种多层协作的感觉,就像我带着一支由AI组成的小团队。它强大、有条理,但调试复杂到让我头疼——一个高层的指令不清晰,底层就乱作一团。真正让我感到“系统开始有生命力”的,是Reflective Planning。有一天,我让Agent完成一组连续报告生成任务,结果它在中间崩了。重新看日志时,我突然想:为什么它不能自己回顾失败的原因?于是我加了个 Reflector 模块——让模型在每轮执行后自我总结、判断误差、重写计划。第一次成功的那天,它自己在日志里写道:“第3步执行效率低,建议提前缓存数据。” 那一刻,我有种诡异的感动——它仿佛真的学会了“思考自己”。
从线性推理到反思循环,这一路像是在教孩子成长。最初教它一步步思考(CoT),再学会行动(ReAct),接着懂得规划(Plan-and-Execute),然后学会协作(Hierarchical),最后终于懂得反思(Reflective)。每一次演化,背后都是对“智能”的再定义。自早期的大模型推理以来,规划组件经历了明显的演化:
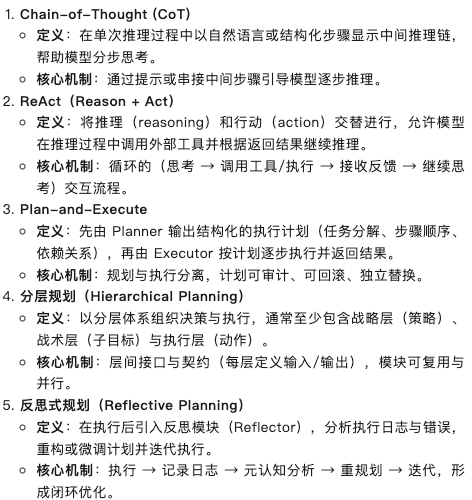
- 线性推理(Chain-of-Thought,CoT):通过显式分步推理提高正确性,属于轻量级、单轮的“思路显式化”手段。
- 交互执行(ReAct):将思考与行动并行化,支持即时工具调用和中间反馈,适合需要交互或外部环境响应的任务。
- 主动规划(Plan-and-Execute):将“规划”与“执行”解耦,先生成结构化计划,再按步骤执行,便于追踪与调试。
- 分层规划(Hierarchical Planning):引入多层次分工(高层策略→中层子目标→低层动作),强调模块化与复用,适合多 Agent 与复杂业务。
- 反思式规划(Reflective Planning):在执行后进行自我评估并重规划,形成闭环的改进循环,目标是长期鲁棒性与自我优化。
总体上,体系从单次线性推理,扩展为支持在线互动与工具能力,再发展为支持长期学习与自我修正的闭环系统。
|
|
|
|
|
|
|
|---|---|---|---|---|---|
| 思路类型 |
|
|
|
|
|
| 交互性 |
|
|
|
|
|
| 可解释性 |
|
|
|
|
|
| 调试难度 |
|
|
|
|
|
| 实时性 / 延迟 |
|
|
|
|
|
| 鲁棒性 |
|
|
|
|
|
| 工程复杂度 |
|
|
|
|
|
| 适用场景 |
|
|
|
|
|
在实际系统中,单一范式往往难以满足工程与业务需求。以下是常见的混合策略与建议:
- CoT + ReAct(轻量混合):在需要解释性又需调用少量工具的场景中,使用 CoT 引导决策步骤,同时在关键步骤触发 ReAct 式的工具调用。
- 适用:问答增强、知识检索带工具调用的场景。
- Plan-and-Execute + ReAct(计划驱动的动态执行):Planner 生成结构化计划,Executor 在执行过程中采用 ReAct 风格与外界交互或调用工具。
- 适用:复杂业务流程自动化,需与外部系统交互的任务。
- 分层规划 + A2A(跨 Agent 协作):高层由战略 Agent 发起,中层/底层由不同 Agent 分担,并通过 A2A 协议通信。
- 适用:企业级多团队、多系统协作场景。
- Plan-and-Execute + Reflective(带自我优化的执行):Planner/Executor 结构化执行,并周期性触发 Reflector 来优化长期策略。
- 适用:需要长期改进的工作流(例如自动化报告、长期监控与优化)。
- 完整闭环(分层 + 执行交互 + 反思):分层规划负责架构,Executor 使用 ReAct 与工具交互,Reflector 定期对关键任务做回顾并触发重规划。
- 适用:对可用性、可维护性和长期优化有高要求的产品级智能体系统。
在选择规划组件时,可参考以下因素权衡:
- 任务复杂度:任务越复杂倾向于分层或 Plan-and-Execute;
- 是否依赖外部环境/工具:若强依赖外部资源,优先考虑 ReAct 或将 ReAct 嵌入 Executor;
- 是否需要长期自适应/学习:若是长期任务或需持续优化,引入 Reflective 模块;
- 实时性要求:延迟敏感场景避免过多反思迭代,优先 ReAct 或 CoT;
- 工程与运维成本:若希望快速上线,优先 CoT 或 Plan-and-Execute 的简化版本;复杂企业级系统考虑分层与反思结合。
从 CoT 到反思式规划,规划组件体现了从“线性推理”到“交互执行”,再到“动态优化”的演化轨迹。五类方法各有侧重:CoT 强调思路显式化,ReAct 强调与环境的实时互动,Plan-and-Execute 强调职责分离与可审计性,分层规划强调模块化与规模化协作,而反思式规划则以自我评估与闭环优化为核心。工程实践中,应根据任务属性、实时性与长期维护成本,采用多范式组合的策略,以在性能、鲁棒性与可维护性之间取得平衡。现在的我,已不再追求某一种完美的范式。真正成熟的系统,往往是多种范式的融合。比如我在自动化内容生成项目中,用 Plan-and-Execute 来管流程,用 ReAct 调接口,再加 Reflective 模块做周期性优化。那种体系化、自进化的感觉,让我第一次感受到智能体系统的“灵魂”。最后,我常常在深夜调试日志时想:这一路,其实和人很像。我们先学会推理,再学会行动,然后学会规划,最后才懂得自省。Agent 的规划体系,不过是我们在机器上重演“学习”的全过程。而我,也在这场演化中,学会了如何让机器更像人——不是聪明,而是有意识地变得更好。
© 版权声明
文章版权归作者所有,未经允许请勿转载。


